
I databehandling kan CAN-grensesnitt være en delt grense over de to separate delene av en systemkonversasjonsinformasjon. Samtalen kan gjøres mellom maskinvare, programvare, mennesker, eksterne enheter og kombinasjoner av disse. Noen maskinvareenheter på en datamaskin som en berøringsskjerm fordi en berøringsskjerm kan dele og motta informasjon gjennom grensesnittet, mens andre enheter som en mikrofon, mus er bare en vei. Grensesnitt er hovedsakelig i to typer som maskinvaregrensesnitt og programvaregrensesnitt. Maskinvaregrensesnitt brukes i mange av enhetene som inngang, utdataenheter, busser og lagringsenheter. Dette CAN-grensesnittet kan defineres av de logiske signalene. Et programvaregrensesnitt kan være tilgjengelig i et bredt spekter på forskjellige nivåer. Et operativsystem kan grensesnitt med forskjellige deler av maskinvaren. Programmene eller applikasjonene på OS må kanskje kommunisere gjennom strømmer og i objektorientert programmering, må objekter i alle applikasjoner kommunisere gjennom metoder.

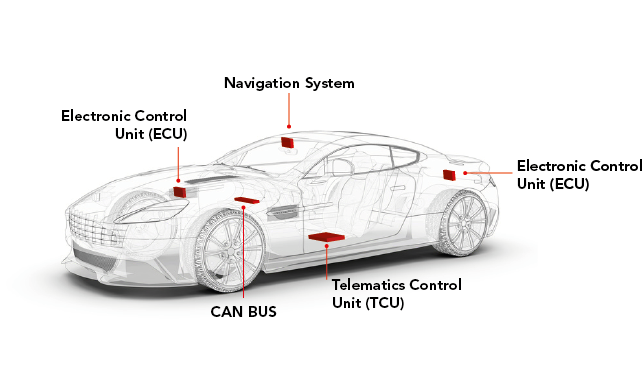
KAN BUSS
CAN-bussen ble utviklet i 1983 hos Robert Bosch GmbH. Denne protokollen ble utgitt i 1986 på SAE Congress (Society of Automobile Engineers) i Detroit, Michigan. Den første CAN-protokoll ble produsert av Philips og Intel og utgitt på markedet i 1987. Men BMW-serien-8 var det første kjøretøyet som hadde et CAN-protokollbasert multiplex ledningsnett.

KAN BUSS
Den fulle formen for CAN er et kontrollernettnettverk . Det er en type kjøretøybuss som hovedsakelig er designet for å tillate forskjellige enheter og mikrokontrollere å samhandle med hverandre uten vertsdatamaskin. Denne protokollen er basert på en melding og er hovedsakelig designet for elektriske ledninger i biler. Bosch ga ut forskjellige versjoner av CAN, og i 1991 ble den siste CAN 2.0 publisert.
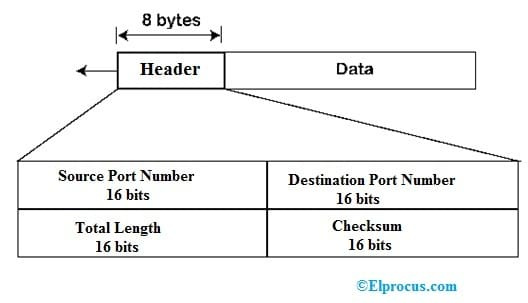
CAN består av to deler, hovedsakelig som del A og del B, der del A er en 11-biters identifikator og den er i standardformat. Del B er en 29-biters identifikator, og den er i utvidet format. En CAN som bruker 11-bits identifikatorer kalles AN 2.0A og en CAN som bruker 29-bit identifikatorer kalles CAN 2.0B
Grensesnitt mellom CAN og USB
Grensesnitt mellom CAN og USB er en enkel enhet som brukes til å overvåke CAN-bussen. Denne enheten bruker NUC140LC1CN 32 K Cortexes-M0 mikroprosessor. Den har både CAN- og USB-periferiutstyr.
Hovedtrekkene ved grensesnitt CAN til USB er
- Det er veldig enkelt å designe
- Godt matchet med protokollen LAWICEL CANUSB
- Å eksponere seg som en enhet som FTDI USB
- Den støtter CAN 2.0B 29-biters og CAN 2.0A 11-biters rammer
- Den består av en intern meldingsbuffer (FIFO CAN)
- Den får strøm fra USB-port
- For fastvareoppdateringer brukes en masselagringsenhet (Flash-resident USB)
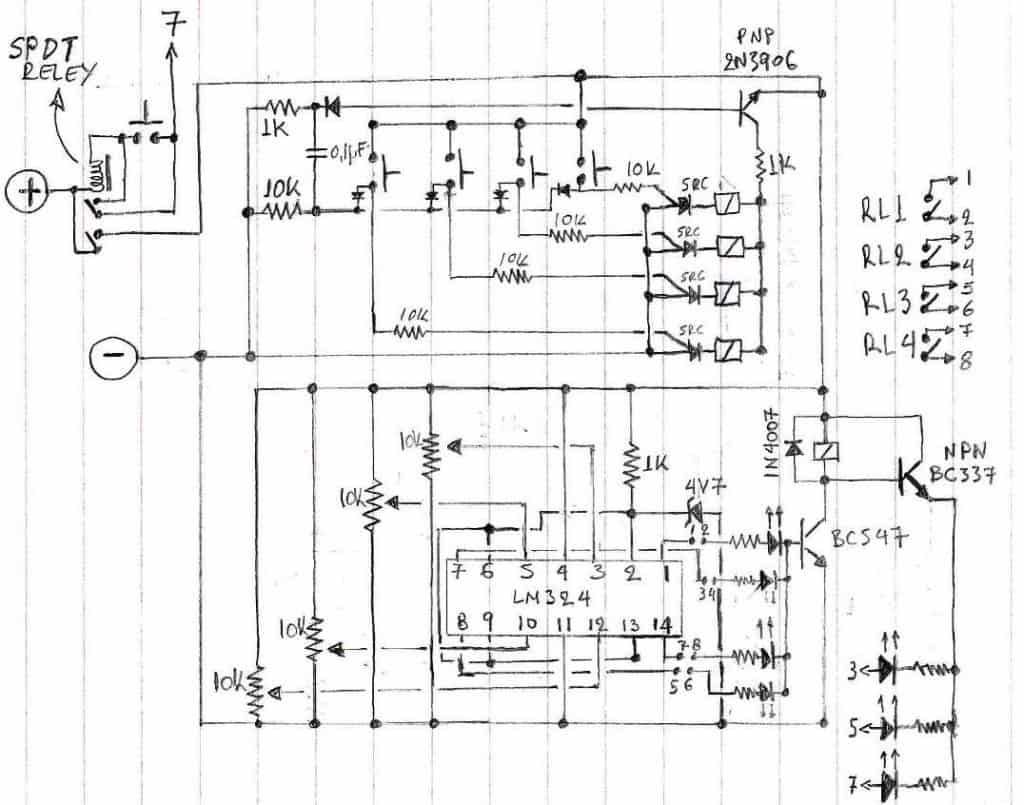
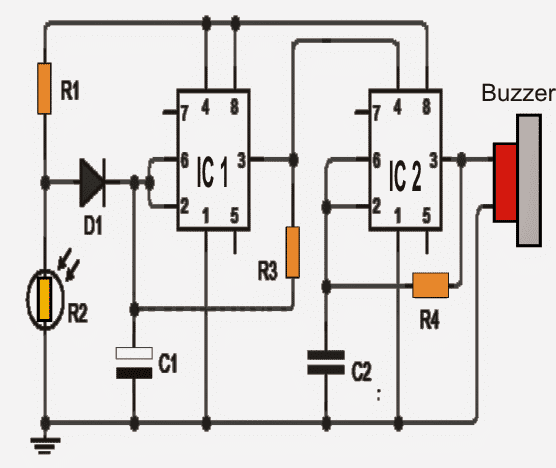
Skjematisk diagram
Kretskonfigurasjonen for grensesnittet mellom CAN og USB er vist nedenfor. En CAN-transformator brukes til å gjøre det mulig for NUC140 CAN-enheten å samhandle med CAN-bussen. Brikken TJA1051T løser formålet fra NXP. Mikroprosessoren NUC140 er i stand til å arbeide med en 5V strømforsyning. Det er ikke nødvendig med en ekstra 3,3V spenningsregulator. Denne praktiske ordningen gjør en enkel oppgave å implementere CAN til USB-grensesnitt.

Skjematisk diagram
Kretsen er bygget med tre status-lysdioder, nemlig D1, D2 og D3.
- Her sier statusen til D1-dioden at USB er koblet til verten
- Her sier statusen til D2-dioden at aktiviteten til CAN-buss
- Feilene i CAN-bussen kan indikeres med D3-diode
NUC140-mikroprosessoren har ikke en integrert oppstartslaster, og den beste måten å programmere er bare brukt Nuvoton ICP-programmerer og VÆPNE SWD-grensesnitt (Serial Wire Debug). Hvis boot loader tidligere er dumpet med et program, kan den utløses. Hvis du kobler til JP1 før du setter strøm på grensesnittet, starter opplasteren.
Boot Loader
Flashminnet til NUC140LC1-mikroprosessoren er delt inn i to seksjoner. De utfører brukerprogramkode og boot loader. Størrelsen på boot loader og utførelse av brukerprogram er 4K og 32K. Her brukes masselagringsenheten (MSD) boot loader fra Nuvoton til å bygge en fullt funksjonell USB boot loader. Boot loader aktiveres ved å koble til en JP1-genser. Så til slutt må en flyttbar stasjon være synlig i vertsfilsystemet med 32 KB størrelse. Bare kopier og lim inn oppdateringen av CAN til USB-firmware til boot loader-stasjonen. Koble fra USB-kabelen, koble fra genseren og koble den til igjen. Oppdateringen av ny firmware skal nå kjøre.

Boot Loader
Programmering av CAN til USB-grensesnitt og NuTiny-SDK-140
Programmering av mikroprosessor NUC140 trenger Nuvoton ICP programmeringsapplikasjon og Nuvotons Nu-Link programmerer. Men her er NuTiny-SDK-140 (NUC140 demo-kort) tilgjengelig fra Digi-Key. Den består av to deler som Nu-Link-programmerere og delen med NUC140-brikke. Dette brettet er til og med perforert for å skille den delen av Nu-Link. Egentlig kan du designe denne enheten eksklusivt rundt NUC140-demo-kortet, den eneste ekstra CAN-mottakerbrikken vil være viktig.

NUC140 styret
Dermed handler dette om CAN-grensesnitt med USB inkluderer, CAN-buss, grensesnitt CAN til USB, skjematisk diagram, bagasjelaster og NUC140 mikroprosessor. Vi håper at du har fått en bedre forståelse av dette konseptet. Videre, eventuelle spørsmål angående denne artikkelen, vennligst gi dine verdifulle forslag ved å kommentere i kommentarfeltet nedenfor. Her er et spørsmål til deg, hva er applikasjonene til CAN-grensesnittet?
Fotokreditter:
- CAN til USB-grensesnitt saelig
- KAN BUSS canbuskit
- NUC140 instruerbare



{kind=link}
{kind=link}
{kind=link}