Den elektromekaniske enheten eller maskinen som brukes til forskjellige formål og styres og betjenes ved hjelp av programmeringsteknikker kalles som en robot. Robotene er forskjellige typer basert på deres applikasjoner som industrielle roboter , militære roboter, romroboter, innenlandske roboter, gåroboter, klatreroboter, og så videre. Den mest avanserte robotikkprosjekter utvikles for effektiv bruk innen ulike felt for flere applikasjoner. La oss i denne artikkelen diskutere en spesiell type robotprosjekter, nemlig linjefølgende robotkjøretøy med gang- og klatringsmekanisme.
Robotkjøretøy

Robotikkprosjekter for ingeniørstudenter
De robotkjøretøyer er spesielle typer maskiner designet for å bevege seg på bakken, i luften, under vann og i rommet autonomt uten et menneske om bord. Disse robotkjøretøyene styres og drives av forskjellige sensorer baserte kontrollsystemer. Robotkjøretøyene er spesielt designet for bruk under forhold der mennesker ikke kan komme inn, for eksempel brannulykker, veldig høye eller svært lave temperaturer osv.,.
Line Follower Robot

Line Follower Robot
Robotbilen som beveger seg ved å følge en bestemt sti eller linje, kan betegnes som en linjefølgerrobot . Disse linjefølgerrobotene brukes spesielt i industrielle applikasjoner for spesielle formål, for eksempel å transportere forskjellige deler eller maskiner eller kjøretøy (biler, sykler, etc.) ved å følge den spesifikke linjen fra ett punkt (genereringsenhet) til et annet punkt (monteringsenhet) .
Den vanlige linjen som følger et robotkjøretøy med spesielle funksjoner som gang- og klatringsmekanisme er en av interessante robotikkprosjekter for ingeniørstudenter , som kan brukes til flere applikasjoner. Enkle trinn for å designe en linjefølgerrobot med gang- og klatringsmekanisme er vist nedenfor.
Trinn 1: Samle nødvendige komponenter

Elektriske og elektroniske komponenter
Komponentene som kreves for designlinjen etter et robotkjøretøy med gang- og klatringsmekanisme, skal estimeres basert på robotapplikasjon. Samle alle elektriske og elektroniske komponenter som motstander, kondensatorer, IR-sendere, DC-motorer, transistorer, robotkropp og fotodioder med passende klassifisering sammen med andre deler som papp, bolter, muttere, aluminiumsstrimler, etc., etter behov.
Trinn 2: Analyse av kretsen for linjefølgerrobot

Linje som følger robotkjøretøy som kan utvides til å gå og klatre robotblokkdiagram
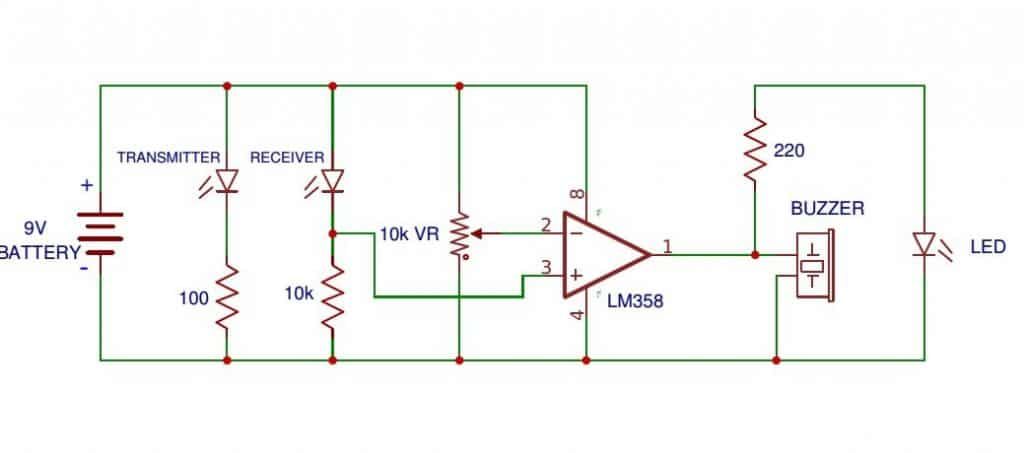
Design først et blokkskjema over prosjektkretser med forskjellige blokker som f.eks strømforsyningsblokk , IR LED og fotodiode blokk og så videre. Etter å ha samlet komponenter, analyser kretsdesignen basert på å jobbe med forskjellige komponenter som brukes. Plasser deretter komponentene over et loddfritt brødbord i henhold til kretsskjemaet ved hjelp av tilkoblingsledninger for å teste kretsen som fungerer før du monterer kretsen på PCB. Ved å teste kretsen over loddfritt brødbrett hvis noen endringer kreves i kretsen eller klassifiseringen av komponentene, kan vekslinger gjøres enkelt uten å kaste bort penger og tid til å bytte ut komponenter eller for å endre kretsdesign.
Trinn 3: Montering og lodding av komponenter

Linje som følger robotkjøretøy som kan utvides til å gå og klatre-robotprosjekt
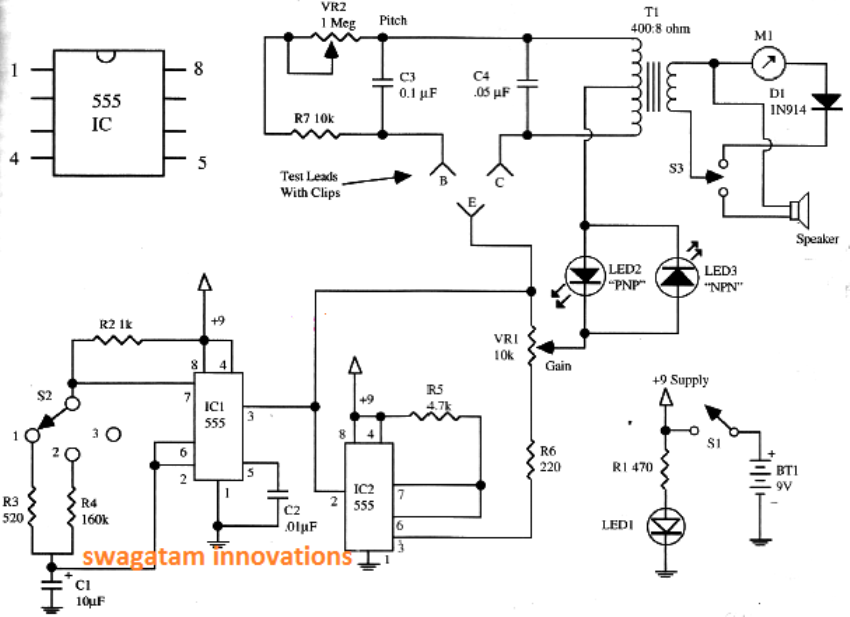
Dermed, etter å ha analysert kretsdesignet, monterer du komponentene i henhold til kretsdiagrammet over kretskortet. Deretter lodder du kretsen ved hjelp av loddepistol og loddetråd ved å følge riktige retningslinjer for lodding. Koble alle delene til roboten riktig for å danne en linjefølgerrobot som vist på bildet ovenfor, og lim delene til robotkjøretøyet, om nødvendig.
Trinn 4: Arbeid med Line Follower Robot
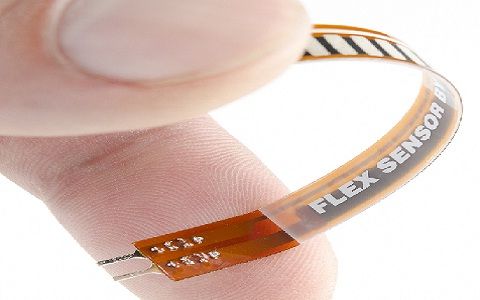
IR-senderen og fotodioden brukes som en fotosensor par som kan brukes til å oppdage den angitte banen for bevegelse av linjefølgerroboten mens du går og klatrer på vegger. Fotosensorparet gir passende signaler for å bytte transistorer for å drive motorene til linjefølgerroboten.
Trinn 5: Linjefølger robotkjøretøy med gang- og klatringsmekanisme
Det er mange robotikkprosjekter for ingeniørstudenter i hvilken linjefølger robotkjøretøy med gang- og klatringsmekanisme er et innovativt og interessant prosjekt å designe på egen hånd ved å bruke vår gratis eBok for å designe elektronikkprosjekter.
De anvendelse av robotikk øker raskt i vårt daglige liv for flere funksjoner, for eksempel industrielle applikasjoner - å flytte eller løfte tunge produkter, transportere innenfor et begrenset område ved å følge spesifikk vei, prosessering, sveising, husholdningsapparater, autonome roboter, militære roboter for å redusere menneskelige involvering og fare, samarbeidsroboter for samhandling med mennesker slik at for å utføre flere oppgaver, pedagogiske roboter, mobile roboter og humanoider.
Er du interessert i å designe elektronikkprosjekter på egenhånd? Vet du hvordan du skal utvikle humanoide roboter? Hvis du vil vite mer om robotikkprosjekter for ingeniørstudenter, kan du legge inn spørsmål, kommentarer, ideer og forslag i kommentarfeltet nedenfor for teknisk hjelp.







![24 V til 12 V DC-omformerkrets [ved bruk av bryterregulator]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)