Det er en veldig interessant ting å bruke en robot fjernkontrollteknologi - om roboten brukes til morsomme spillorienterte applikasjoner eller for teknisk drift hjemmeautomatisering og industrielle applikasjoner (plukk og plasser robot, linje som følger robot , metalldetektor robotkjøretøy, IR-kontrollert robotkjøretøy, brannslukking robotbil , mobiltelefonstyrt robotkjøretøy, krigsfeltets spioneringsrobot med nattesyn trådløst kamera, stemmestyrt robotkjøretøy) og så videre].
Fremgangsmåten for å lage en robotkropp og det mekaniske fjernkontrollsystemet er veldig interessant for elektriske og elektroniske hobbyister og studenter. Men i denne artikkelen gir vi detaljert og lettfattelig, trinnvis beskrivelse for å lage en fjernkontrollrobot. Generelt er robotkroppen designet med hjul, metallstrips, metallplate eller plastplater, DC-motorer , diskrete komponenter, tilkoblingsledninger, muttere og bolter.
De trinnvise prosedyrene gitt her vil hjelpe deg å lage en fjernkontrollrobot på egen hånd på en profesjonell måte. Du kan lære både hvordan du lager en robotkropp, så vel som dens fjernkontrollmekanisme med det gitte infografisk . Denne artikkelen gir absolutt de tekniske ferdighetene som er nødvendige for å lage en fjernkontrollrobot.
Merk: Denne infografikken for fjernkontrollrobot er utelukkende for ingeniørstudenter og elektroniske hobbyister og ikke ment for kommersielle formål. (Vilkår og betingelser gjelder - Ikke prøv å implementere trinnene gitt i denne artikkelen på egen hånd hvis du ikke vet hvordan du skal håndtere elektrisk og elektroniske kretser ).
8-trinn for å designe en fjernkontrollrobot
Trinn 1: Kjenn robotapplikasjonen og begynn å analysere kroppens robot
Primært må du kjenne applikasjonen du skal designe fjernkontrollroboten for. Basert på applikasjonen, må du designe robothuset. Her diskuterer vi hvordan du lager et IR-fjernstyrt robotkjøretøy.
Trinn 2: Samle maskinvarekomponentene som kreves for å lage roboten
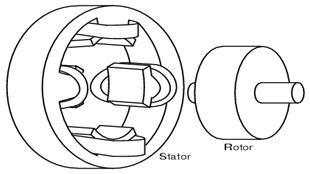
Etter å ha bestemt deg for robotapplikasjonen, samle alle nødvendige komponenter i robotlegemet, for eksempel plastbrettet, hjulene, metalllistene, DC-motorene og alle andre komponenter for å lage en robotkropp.
Trinn 3: Bygg robotens kropp
Fest de samlede komponentene for å danne robotens kropp. Fest hjulene ved hjelp av metallstrimler, DC-motorer, og sørg for å fullføre hele robotkroppenheten med innredning, lodding og liming.
Trinn 4: Velg en fjernkontrollteknologi
Etter å ha designet hele robotlegemet, må du kontrollere roboten ved hjelp av en fjernkontrollteknikk. Velg riktig fjernkontrollteknologi basert på applikasjonskravet. Du kan bruke den infrarøde TV-fjernkontrollen eller IR-fjernkontrollteknologien til å kontrollere roboten.
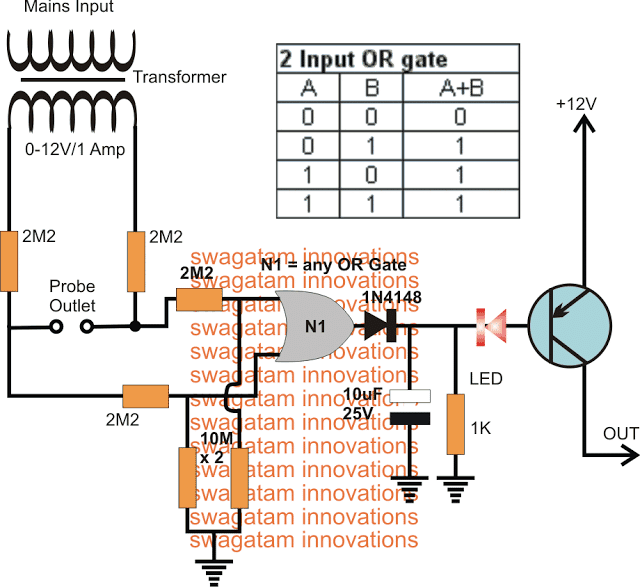
Trinn 5: Analyser og design fjernkontrollkretsen
Analyser komponentene som kreves for å designe fjernkontrollkretsen for å kontrollere roboten ved hjelp av infrarød teknologi. Deretter designer kretsen og installerer komponentene på kretskortet. Neste lodd kretskomponentene på en riktig måte.
Trinn 6: Beregn kommunikasjonsteknologien for fjernkontrolldrift
Kommunikasjonssystemet kreves for å kontrollere roboten eksternt. Det er forskjellige typer kommunikasjon for å designe et fjernkontrollsystem. Basert på kravet som rekkevidden til hvilken fjernkontroll er beregnet, kravet til siktlinje osv., Må du velge passende fjernteknologi. Du kan bruke IR ekstern teknologi brukes.
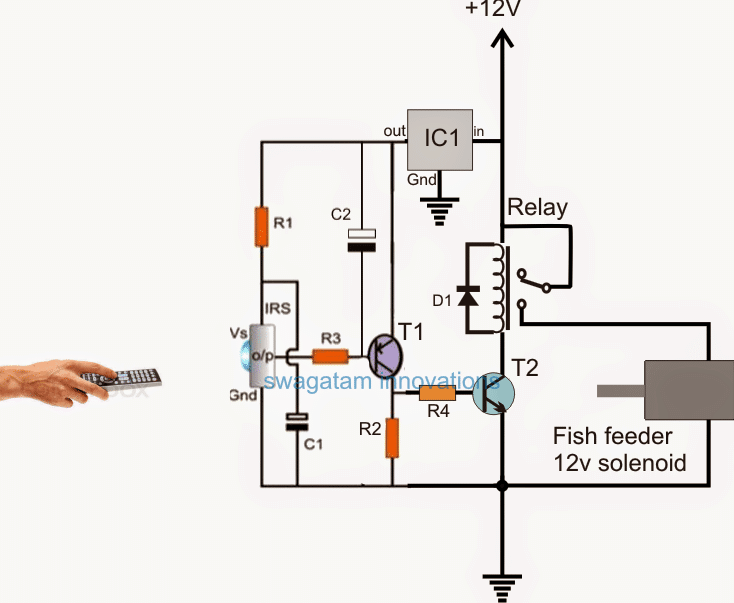
Trinn 7: Design IR-fjernkontrollsystemet
Det infrarøde fjernkontrollsystemet består av en senderende og en mottakerende. Senderen brukes av kontrolleren og mottakerenden er koblet til roboten.
Trinn 8: Styr roboten ved hjelp av fjernkontrollen
Roboten kan fjernstyres ved hjelp av trykknappene på IR-senderen. Når du trykker på disse knappene, sendes de aktuelle kommandoene til robotmottakeren for å bevege roboten i retning fremover, bakover, til venstre eller til høyre.

Bygg dette bildet på nettstedet ditt (kopier koden nedenfor):