
WSG-DSA er en gripefinger som integrerer taktil sensing for høyoppløselig profiltilbakemelding under griping. For sensing formål bruker den en DSA9205i intelligent taktil svinger. Den passer på toppen av WSG-kjeftene og er grensesnittet med griperkontrollen rett gjennom den integrerte sensorporten i underkjevene, slik at ingen eksterne komponenter og kabler er nødvendig for å inkludere en følbar enhet for håndteringsapplikasjonene dine. Disse typer fingersensorer oppdages automatisk og parametriseres av WSG. Trykkprofilen kan brukes fra innsiden av gripekontrolleren ved å bruke et kraftig skriptgrensesnitt. Denne artikkelen diskuterer typer taktilitet sensorer og deres arbeid .
Hva er en taktil sensor?
En taktil sensor er en enhet. Den måler den kommende informasjonen som svar på den fysiske interaksjonen med miljøet. Berøringsfølelsen hos mennesker er generelt modellert, dvs. kutan sans og kinestetisk sans. Kutan berøring har evnen til å oppdage stimuli som skyldes mekanisk stimulering, smerte og temperatur. Den kinestetiske berøringen mottar sensorinnganger fra reseptorene i muskler, sener og ledd.

Taktil sensor
Typer av taktile sensorer
Det er forskjellige typer følbare sensorer som er gitt nedenfor
- Kraft / moment sensor
- Dynamisk sensor
- Termisk sensor
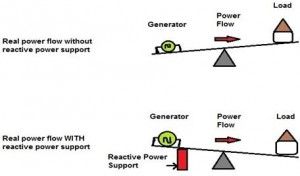
Kraft / moment sensor
Kraft / dreiemoment sensorer brukes i kombinasjon med en taktil matrise for å gi informasjonen for kraftstyring. Disse typer sensorer kan føle belastning hvor som helst som den distale lenken til en manipulator og i begrensninger som en hudsensor. Hudsensoren gir generelt mer nøyaktig kraftmåling ved høyere båndbredde. Hvis manipulatorkoblingen er definert generelt, og signalpunktkontakten antas, kan kraft- / dreiemomentsensoren gi informasjon om kontaktplasseringen av kraft og øyeblikk - den kalles iboende taktil sensing. Bildet av dreiemomentføleren er vist nedenfor.

Kraft- eller dreiemoment
Dynamisk sensor
Dynamiske sensorer er mindre akselerometre ved fingerstrimlene eller ved huden på robotfingeren. Den generelle funksjonen som Pacinian-kropper hos mennesker og har like store respektive felt, og et eller to skinn akselerometer er tilstrekkelig for hele fingeren. Disse sensorene oppdager effektivt kontakt og brudd, vibrasjonene knyttet til å gli over strukturerte overflater.

Dynamisk sensor
En stressfrekvenssensor er den andre typen dynamisk taktil sensor. Hvis fingertuppen glir med noen få cm / s overordnede små støt eller groper på en overflate, ble de midlertidige endringene i huden viktig. En piezoelektrisk polymer som PVDF produserer en ladning som svar på skader som kan påføres for å produsere en strøm, som er direkte proporsjonal med endringsområdet.
Termisk sensor
Termiske sensorer er viktige for menneskets evne til å identifisere materialene til gjenstandene som er laget, men noen brukes også i robotikk. Den termiske sensingen innebærer å oppdage termiske gradienter i huden, som tilsvarer både temperaturen og den termiske ledningsevnen til et objekt. Robotiske termiske sensorer er involvert i Peltier-kryssene i kombinasjon med termistorene .

Termisk sensor
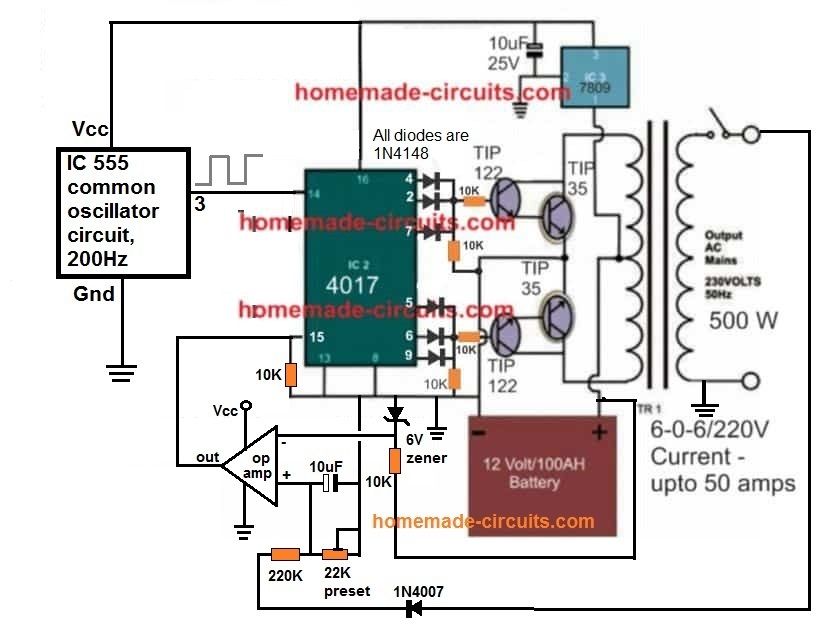
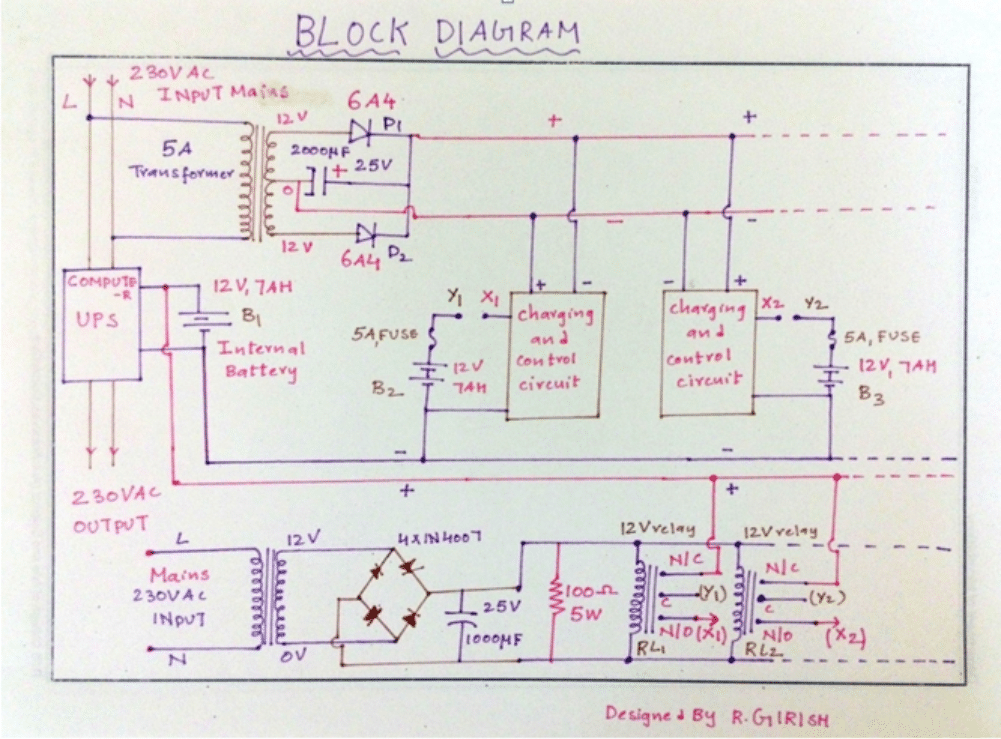
Arbeidsprinsipp og kretsskjema for den taktile sensoren
De taktile sensorene er utviklet for å gi taktile senseringsevner for teleoperasjonsmanipulatorer og intelligente roboter. Taktile sensorer kan identifisere en normal kraft som påføres de taktile piksler for å tryllebinde kraftstyringen og de berørbare bildene og for å generere gjenkjenning av objekter. Imidlertid, for å oppnå taktile bilder og normale krefter, er informasjonen om tangensiell kritisk for styring av kontroll og lysforebygging, som er fascinerende for oppgavens suksess - det er derfor nødvendig med de tredimensjonale taktile sensorene.

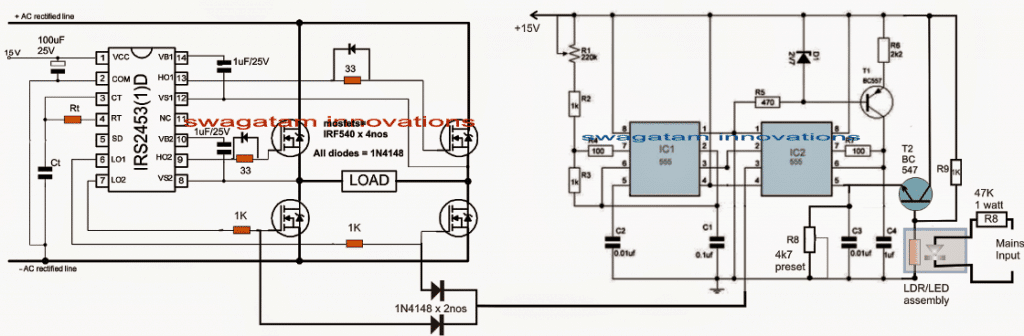
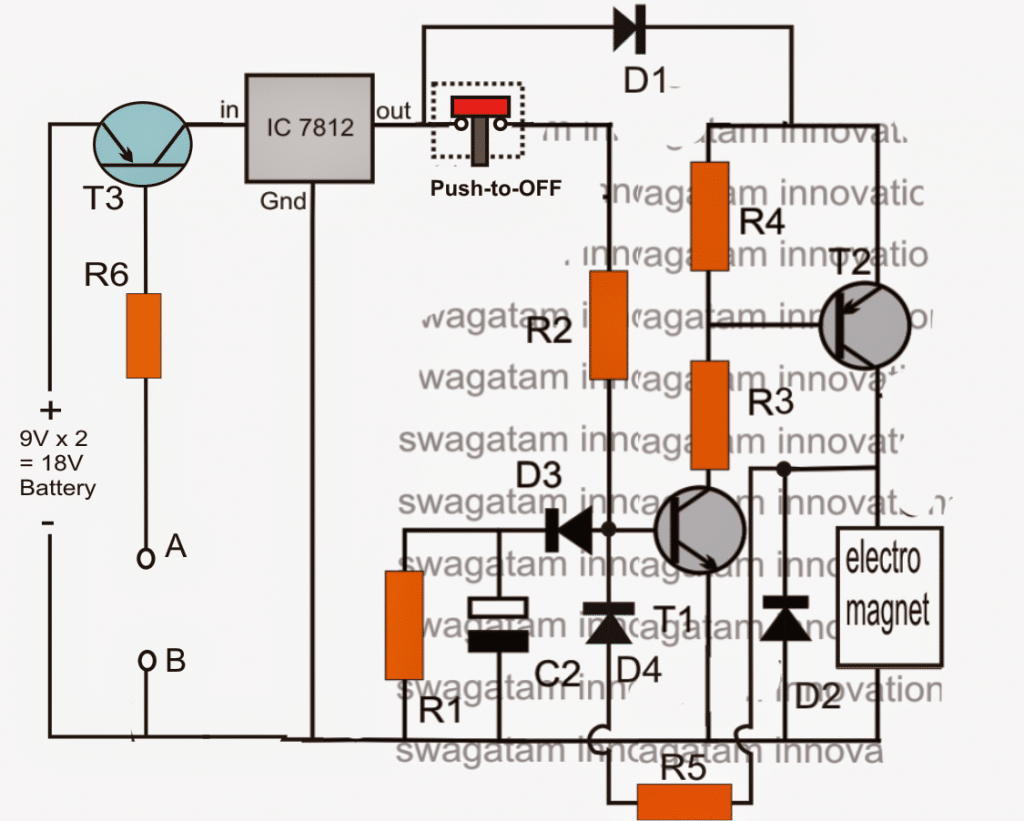
Kretsskjema for taktil sensor
Det er flere tredimensjonale taktile sensorer utviklet ved hjelp av de piezoresistive, kapasitive og valgfrie sensorelementene, og disse taktile sensorene er produsert av MEMS-teknologi . De integrerte sensorelementene og forbehandlingskretsene er for kompaktheten, men disse er for svake og lett ødelagte for de fleste applikasjoner, og for eksempel er kraftområdet til en taktil sensor bare 0,01 N w4x, og de andre taktile sensorene er ikke levert av MEMS-teknologien. Nedenfor kretsskjema viser en taktil sensorkrets.
Taktil sensor i robotikk
Den taktile sensoren som brukes i NASA-robotene er gitt nedenfor
- Et av eksemplene direkte knyttet til planetarisk leting.
- NASA bruker disse sensorene på den internasjonale romstasjonen for å hjelpe mennesker med reparasjon / vedlikehold i miljøet
- NASA har prøvd mange taktile sensorer innen robotikk som er i den innledende fasen. De har brukt Motstand for sensing , og nå er kvantetunnelkompositter i bruk
- Flere belastningsknapper og celler er en praksis for å utvikle taktile sensorer produsert av en industriell robot
Taktile sensorapplikasjoner
Ta på sensorapplikasjoner brukes i
- Robotikk
- Maskinvare
- Sikkerhetssystem
- Touch-skjerm enheter på mobiltelefonen
- Databehandling
Fordeler med taktil sensor
Fordelene med den taktile sensoren er gitt nedenfor:
- De tilbyr brukervennlige taktile sensorløsninger
- Den taktile sensoren har ingen eksterne komponenter og kabler
- Kompakt utvinning
- Bekreftet taktil sensing teknologi fra robotikk.
Dette handler om den taktile sensorens arbeidsprinsipp og applikasjoner. Vi håper at den gitte informasjonen er nyttig for å gi god informasjon og forståelse av prosjektet. Videre, hvis du har spørsmål angående dette konseptet på elektriske og elektroniske prosjekter , kan du kommentere nedenfor. Her er et spørsmål til deg - hva er funksjonene til taktile sensorer?
Fotokreditter:
- Taktil sensor kvadratrom
- Kraft / moment sensor transducertechniques
- Dynamisk sensor vernier
- Termisk sensor bilder-amazon









{kind=link}
{kind=link}
{kind=link}