Grensesnitt DC-motor til mikrokontrolleren er et veldig viktig konsept i mange industrielle og robotapplikasjoner. Ved å koble likestrømsmotor til mikrokontrolleren kan vi kontrollere motorens retning, kontrollere motorens hastighet. Denne artikkelen beskriver deg, Hastighetskontroll av DC-motor ved bruk av 8051microcontroller ved hjelp av Bluetooth Android-kontroller. Blokkdiagrammet er vist nedenfor.

Blokkdiagram over hastighetskontroll av DC-motor med Android-applikasjon
Hastighetskontroll av DC-motor med Android-applikasjon
Hastighetskontroll av DC-motor ved hjelp av Android-mobil har mange applikasjoner som industrielle applikasjoner, rulletrapper, heiser, robotapplikasjoner og sikkerhetssystemapplikasjoner. Brukeren må installere en Android-applikasjon på sin Android-smarttelefon.
Brukeren kan sende veibeskrivelse for å kontrollere hastigheten på DC-motoren. Trådløs Bluetooth-kommunikasjon brukes til å sende kommandoer til brukeren og kontrolleren. De viktigste maskinvarekomponentene i kretsen er 8051 Microcontroller, motor driver L293D IC, DC-motor, Bluetooth-modul og Android-smarttelefon.
Se denne lenken for å vite mer om 8051 Historie og grunnleggende mikrokontroller
Den maksimale utgangsstrømmen til mikrokontrollerpinnen er 15mA ved 5V, men den får ikke DC-motoren til å fungere, og til og med den bakre EMF (elektromotivkraft) som produseres av motoren kan skade mikrokontrolleren.
Derfor er det ikke verdig å grense DC-motor direkte til mikrokontrolleren. Så motorførerkrets (L293D IC) er vant til grensesnitt DC-motor og mikrokontrolleren .
Motordriver (L293D)
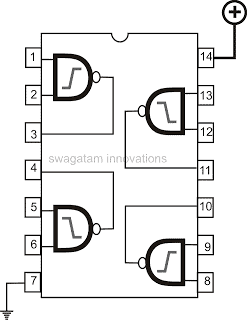
L293D er en dual H-bridge motor driver integrert krets (IC). Motordrivere fungerer som strømforsterkere siden de tar et lavstrømskontrollsignal og gir et signal med høyere strøm. Dette signalet med høyere strøm brukes til å drive motorene. L293D inneholder to innebygde H-bridge driverkretser . I sin vanlige driftsmåte kan to likestrømsmotorer kjøres samtidig, både i fremover og bakover. Motoroperasjonene til to motorer kan styres av inngangslogikk ved pinnene 2 og 7 og 10 og 15.
Inngangslogikken 00 eller 11 vil stoppe den tilsvarende motoren. Logic 01 og 10 vil rotere den med henholdsvis med og mot retning. Aktiver pinnene 1 og 9 (tilsvarende de to motorene) må være høye for at motorene skal kunne begynne å fungere. Når en aktiveringsinngang er høy, blir den tilknyttede driveren aktivert.
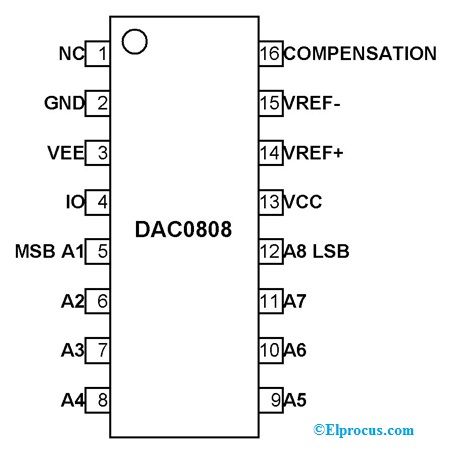
Som et resultat blir utgangene aktive og fungerer i fase med sine innganger. På samme måte, når aktiveringsinngangen er lav, er den driveren deaktivert, og utgangene er av og i høyimpedanstilstand. Stiftdiagrammet og den interne strukturen til L293D IC er vist nedenfor.

Pinnediagram og intern struktur av L293D IC
Hva er Android?
De Android-operativsystem fungerer basert på Linux, det er primært designet for berøringsskjerm mobile enheter som smarttelefoner og nettbrett. En av de mest brukte mobile OS i disse dager er Android. Android er programvare som ble grunnlagt i Palo Alto i California i 2003.

Android Mobile
Android er et kraftig operativsystem og støtter et stort antall applikasjoner i smarttelefoner. Disse applikasjonene er mer komfortable og avanserte for brukerne. Maskinvaren som støtter android-programvare er basert på ARM-arkitekturplattform .
Android er et open source-operativsystem som betyr at det er gratis, og alle kan bruke det. Android har millioner av apper tilgjengelig som kan hjelpe deg med å administrere livet ditt på en eller annen måte, og det er tilgjengelig til en lav pris i markedet på grunn av at Android er veldig populært.
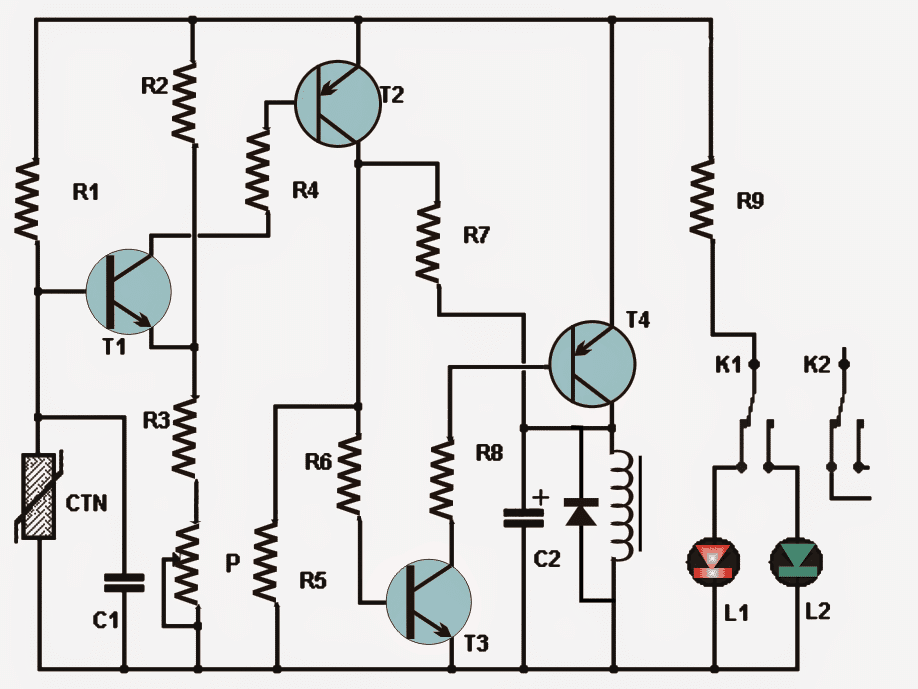
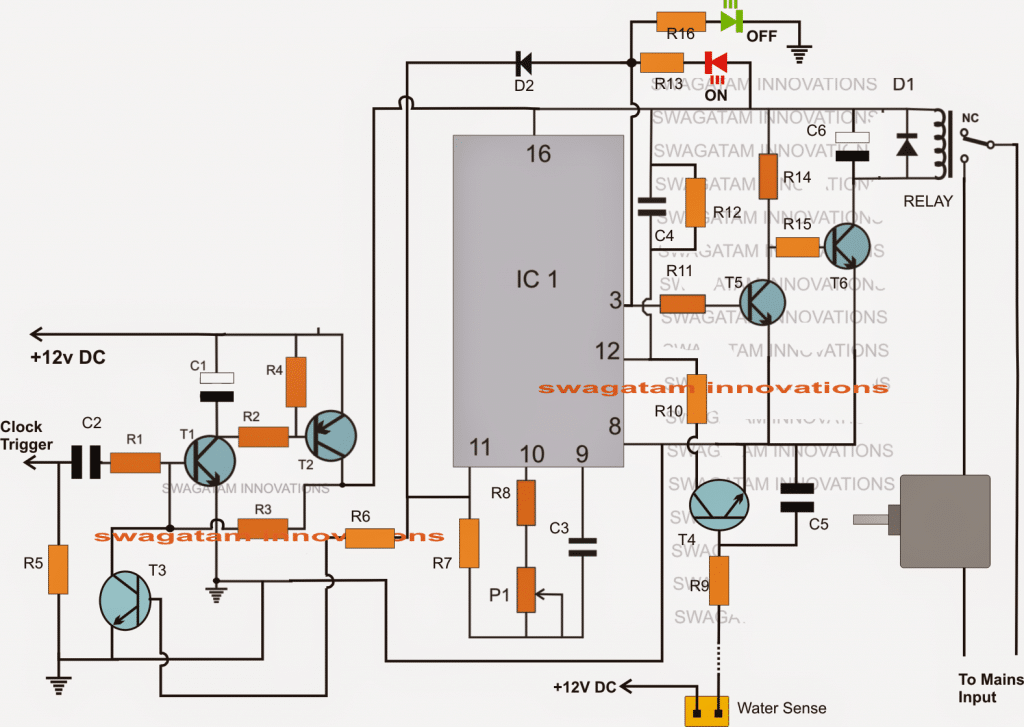
Skjematisk diagram Forklaring av hastighetskontroll av DC-motor
Skjematisk diagram av DC-motorhastighetskontrollkrets og driftsforklaring er gitt nedenfor.

Skjematisk diagram
Kretsen bruker standard strømforsyning som består av en nedtransformator fra 230V til 12V og 4 dioder som danner en bro likeretter som leverer pulserende likestrøm som deretter filtreres av en elektrolytisk kondensator 470 uF til 1000 uF.
Den filtrerte likestrømmen er uregulert, og IC LM7805 brukes til å få 5V DC konstant ved sin pinne nr. 3. Den regulerte 5V DC filtreres videre av en liten elektrolytkondensator på 10µF for all støy som genereres av kretsen.
Kontrollsignalet fra Android-enheten blir sendt via Bluetooth. Dette signalet vil bli kommunisert med mikrokontrolleren ved hjelp av sender og mottaker av begge enhetene. Dette signalet vil bli markert med en enkelt bokstav som styrer motorens hastighet og retning.
Hvordan kontrollere hastigheten på DC-motoren? I dette prosjektet er det viktigste arbeidsprinsippet at PWM-pulser genereres fra den programmerte mikrokontrolleren for å muliggjøre pin 1 i L293D for å øke og redusere pulssekvens for pulser. Disse driftsimpulsene kan føre til at DC-motoren kjøres i riktig retning med spesifikk hastighet.
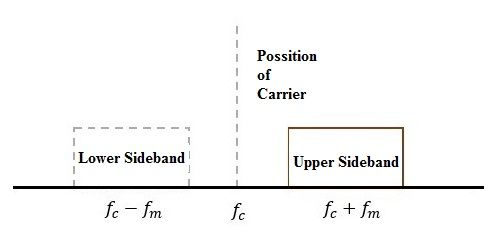
Pulsbreddemodulering
Pulsbreddemodulasjon oppnås fra utgangen fra en mikrokontroller som er behørig programmert til å ta data slik mottatt av en Bluetooth-enhet som er grensesnittet til den. En Bluetooth-modul er behørig grensesnittet til mikrokontrolleren for toveis dataflyt mens programmet kjøres for å utvikle PWM-pulser.
Android-applikasjonen fra en hvilken som helst smarttelefon kommuniserer via telefonens innebygde Bluetooth til Bluetooth-modulen som er koblet til mikrokontrolleren for operasjoner etter behov. Pulsbreddemodulasjonssyklusen er vist nedenfor.

PWM Duty Cycle
Opp-berøringsknappen på smarttelefonen som kjører Android-programmet, brukes til å øke PWM-driftssyklusen mens ned-berøringsknappen er for å redusere driftssyklusen.

Android-applikasjon for DC Motor Speed Control
De DC-motor går gjennom L293D motor driver IC med varierende driftssyklus brukt for å muliggjøre at pin-1 av L293D mates fra mikrokontrolleren for hastighetskontroll. LCD-datapinnene er koblet til mikrokontrolleren for å vise hastigheten i hvilken motoren går.
Derfor er hastighetskontroll av DC-motor ved hjelp av Android-applikasjoner en kostnadseffektiv, praktisk og den sikreste måten å spare strøm. En enkel PWM (Pulse Width Modulation) teknikk kan brukes til å kontrollere motorens hastighet. Driftssyklusen til bølgen styrer hastigheten. Ved å bytte utgangsporter vil den effektivt endre motorens retning.
Videre, eventuelle spørsmål angående denne artikkelen, vennligst gi dine verdifulle forslag ved å kommentere i kommentarfeltet nedenfor. Her er et spørsmål til deg, hva er applikasjonene av DC-motorgrensesnitt til en mikrokontroller?