
TIL robot er en elektromekanisk maskin som er ledet av et kretsløp eller et dataprogram. Roboter har byttet mennesker ved hjelp av kontinuerlige og farlige oppgaver som mennesker velger å ikke gjøre. Tilstede roboter er klassifisert i forskjellige kategorier basert på deres funksjoner og ytelse som industrielle roboter, kommersielle roboter, serviceroboter, mobile roboter. Her er en servicerobot som utfører de kontinuerlige oppgavene for å ønske folket velkommen med en håndbevegelse som representerer “Namaste” gjennom en innspilt talemelding. Generelt, når vi inviterer folk hjem, fester, ekteskapsfunksjoner, kontor osv., Må vi ordne en person til å hilse og invitere dem ved inngangen. Hvis folketallet er lite, er oppgaven enklere. Men hvis du hilser på hundrevis av mennesker, er oppgaven vanskelig. For å overvinne dette problemet, her er et prosjekt, nemlig namaste robot med stemmestyring.

Namaste Robot
Namaste Robot med stemmekontroll
Hovedkonseptet til denne Namaste robotprosjektet er å kontrollere de forskjellige servomotorene gjennom et Arduino-brett. Denne roboten skanner menneskene rundt og roterer hodet 180 °. Hvis den kjenner igjen noen i nærheten, ønsker den personen med Namaste med begge hendene som trykker sammen. Det er den tradisjonelle måten å ønske folk i India på. De applikasjoner av roboter involvere i kjøpesentre, parker, kontorer for å tiltrekke seg folket.
Blokkdiagram over Namastae-robot med stemmekontroll
Den følgende figuren viser blokkdiagrammet til Namaste-roboten med stemmestyrt. I denne typen robot er talekommandoer programmert. Hele utviklingskortet kan kobles til den vanlige strømforsyningen. Beskrivelsen av hver blokk er som følger. De strømforsyning gir strømforsyningen til alle modulene. Disse modulene krever strøm i mA og driftsspenningen vil være 5V.

Blokkdiagram over Namastae-robot med stemmekontroll
Arduino Board
Arduino er en slags verktøy basert på et enkelt mikrokontrollerkort som brukes til å kontrollere og ane den fysiske verden enn en stasjonær datamaskin. For fysisk databehandling er det forskjellige mikrocontrollerplattformer som er tilgjengelige. De viktige funksjonene til en Arduino er billig programvare med åpen kildekode og utvidbar. Arduino-programvaren er tilgjengelig som åpen kildekodeverktøy, og språket kan utvides gjennom C ++ - biblioteker.

Arduino Board
Ping-sensor
Ping-sensoren bruker SONAR til å kontrollere avstanden til et objekt i nærheten. Dette sensor brukes som øynene til roboten for å ane hindringen. For eksempel nærhetssensor. Det gir utmerket rekkevidde og stabile målinger. Driften av denne sensoren påvirkes ikke av svart materiale eller sollys. Spesifikasjonene til ping-sensoren er spenningen er 5V, strømmen er 15mA, sensorvinkelen er IKKE> = 15 og deteksjonsavstanden er 2 cm ~ 450 cm.

Ping-sensor
Grensesnittet mellom ping-sensor og en Arduino er vist nedenfor. Det er fire pinner som er tilgjengelige for å koble ping-sensoren med et Arduino-kort. De fire pinnene på Arduino-kortet er GND, VCC, ECHO og TRIGGER. Pinnene på brettet er D0-D13, ved at 12 og 13 pinner er inngangs- og utgangspinner.
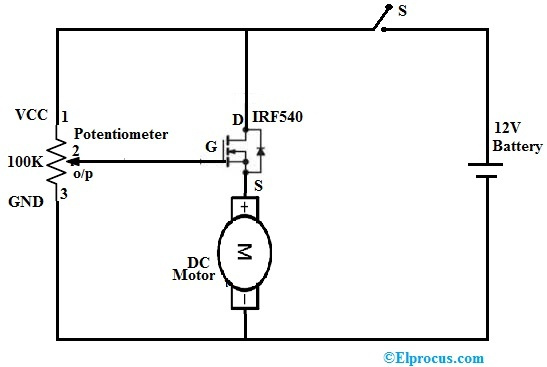
Arduino mikrokontroller tilbyr oss et servokontrollbibliotek som lar oss enkelt bytte servoer. I dette prosjektet brukte vi 5 servoer for å regulere bevegelsene til Namaste-roboten som hode, høyre albue, venstre albue, høyre skulder og venstre skulder. Her betyr de digitale inngangs- / utgangspinnene (D5, D6, D9, D10, D1) pinnene på Arduino-kortet som er grensesnittet til servomotorer.
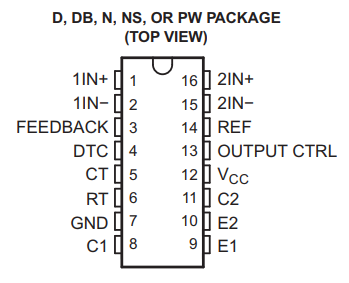
Voice Playback IC
Denne stemmeavspillings-IC tilbyr den innspilte meldingen som spilles med den forhåndsdefinerte frekvenshastigheten. Avspillingen flyttes til lydforsterkerenheten.

Voice Playback IC
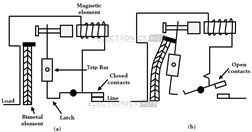
Stafett
TIL relé er en slags bryter fungerer elektrisk. Strømmen gjennom reléets spole lager et magnetfelt som inviterer en spak og endrer bryterkontaktene.

Stafett
Stemmestyring Namastae Robot Arbeider
Arbeidet til Namaste-roboten kan gjøres trinnvis sammen med de simulerte resultatene. Når Namaste-roboten er i en første tilstand, da servomotoren s av roboten 2, 3, 4, 5 er i AV-tilstand eller null-tilstand. Hodet til Namaste-roboten veksler fra senter til høyre, venstre og deretter tilbake til sentrum på grunn av sentrifugering av servomotor1 fra 0 ° -180 °. Bevegelsen til robotens hode spesifiserer at Namaste-roboten leter etter et hinder. Når ping-sensoren oppdager noen hindring, går hodets posisjon til roboten tilbake til midten og Servomotor1-relikvier i 90 ° vinkel og slås AV. Den aktiveres i lav tilstand.
Når servomotoren 1 slås AV, slås de resterende motorene som servo4 og servo5 PÅ. Signallinjen utløses for høyre og venstre skuldre til Namaste-roboten. Nå kan hendene på en robot gjøre bevegelse oppover. Skulder servomotorene er grensesnittet til de digitale inngangs- og utgangspinnene på Arduino-kortet. Men signallinjer eller disse pinnene vil være høye og posisjonen til servoen endres til 90 °. Nå slås servo4 og servo 5 AV.
Endelig kan vi konkludere med at hovedmålet med denne stemmekontrollen roboten er å tilby tjenesten av å ønske folk høflig velkommen ved å oppdage folk som går foran det. Den kan brukes på forskjellige offentlige steder som parker, kjøpesentre, fester osv. Vi håper du har fått en bedre forståelse av dette konseptet. Videre, eventuelle spørsmål angående dette konseptet eller arduino-basert robotprosjekter , vennligst gi dine verdifulle forslag ved å kommentere i kommentarfeltet nedenfor.
Fotokreditter:
- Arduino Board nyacknewsandviews
- Ping-sensor parallaks
- Voice Playback IC kealab
- Stafett awdirect
- Namaste Robot canstockphoto





{kind=link}
{kind=link}
{kind=link}
{kind=link}