Servomotorer er selvstendige mekaniske enheter som brukes til å kontrollere maskinene med stor presisjon. Disse finnes i mange applikasjoner fra leker til industriell automatisering. Det finnes forskjellige typer motorer, men servomotorer er spesielt designet for spesifikk vinkelposisjon for å kontrollere maskinene. Vanligvis brukes servomotoren til å kontrollere vinkelbevegelsen mellom 0 ° til 180 ° og 0 ° til 90 °. De servomotor arbeidsprinsipp basert på PWM ( pulsbreddemodulasjon ) pulser.

Servo motor
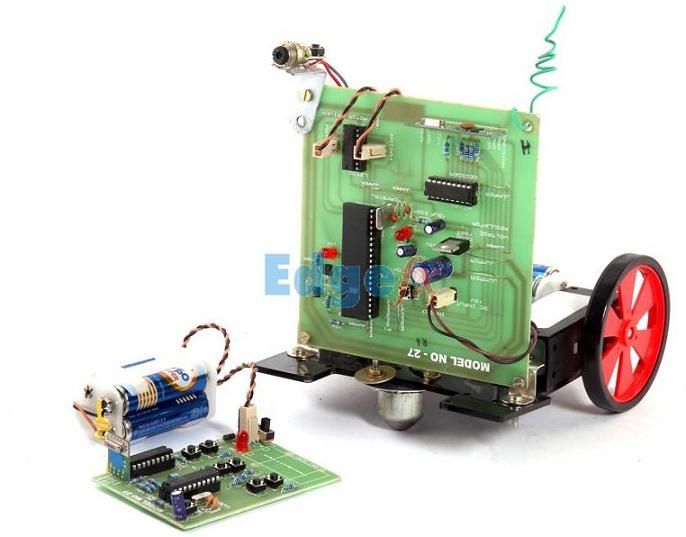
Servomotorgrensesnitt med 8051 mikrokontroller
En servomotor er en av de mest brukte motorene for presis vinkelbevegelse. Fordelen med å bruke en servomotor er at motorens vinkelposisjon kan kontrolleres uten noen tilbakemeldingsmekanisme. Servomotorene brukes vanligvis i kommersielle og industrielle applikasjoner . De er også mye brukt som i drivsystemer som roboter, fly etc.

Grensesnitt servomotor med 8051 mikrokontroller
Hobby servomotorens arbeidsprinsipp og drift er veldig enkel, den besto av tre ledninger der to av dem (svart og rød) brukte for å gi strøm og den tredje ledningen brukes for å gi styresignal. Pulsbreddemodulert (PWM) bølger brukes som styresignaler, og vinkelposisjonen er bestemt av bredden på pulsen ved kontrollinngangen. I denne artikkelen bruker vi en servomotor med rotasjonsvinkel fra 0-180 °, og vinkelposisjonen kan styres ved å variere driftssyklusene mellom 1ms og 2ms.
Her grensesnitt servomotoren 8051 mikrokontroller , den svarte ledningen som er koblet til jordpinnen og motoren får strømmen fra den røde ledningen. Kontrollen av servomotorkoblet port0 på 8051 mikrokontroller. 11.0592MHz krystalloscillatoren brukes til å gi klokken pulsert til mikrokontrolleren og 22pf keramiske kondensatorer som brukes til å stabilisere driften av krystall. 10KΩ og 10uf kondensator brukes til å gi strøm ved tilbakestilling til mikrokontrolleren.
Styring av en servomotor med vinklerotasjoner
Servomotorens arbeidsprinsipp avhenger hovedsakelig av driftssykluser. Den bruker PWM-bølger som styresignaler. Rotasjonsvinkelen er bestemt av pulsbredden til kontrollpinnen. Her brukes servomotoren for rotasjonsvinkel fra 0 til 180 grader. Vi kan kontrollere den presise vinkelposisjonen ved å variere pulsen mellom 1ms og 2ms.

Styring av en servomotor med vinklerotasjoner
Servomotorprogrammering Med vinkelrotasjoner
#inkludere
Sbit servomotor_pin = P0 ^ 5
Annullert forsinkelse
Ugyldig servo_forsinkelse (usignert int)
Ugyldig hoved ()
{
Servomotor_pin = 0x00
Gjøre
{
// snu til 0 °
Servomotor_pin = 0x01
Sevo_delay (50)
Servomotor_pin = 0x00
Forsinkelse (1000)
// snu til 90 grader
Servomotor_pin = 0x01
Sevo_delay (82)
Servomotor_pin = 0x00
Forsinkelse (1000)
// snu til 180 grader
Servomotor_pin = 0x01
Sevo_forsinkelse (110)
Servomotor_pin = 0x00
Forsinkelse (1000)
Mens (1)
}
}
Gyldig forsinkelse (usignert int a)
{
Usignert int p
For (p = 0p
}
Ugyldig servo_forsinkelse (usignert int a)
{
Usignert int p
For (p = 0p
}
Servomotorens arbeidsprinsipp
Servomotorens arbeidsprinsipp avhenger hovedsakelig av 'Fleming left hand rule'. I utgangspunktet er servomotorer tilpasset med DC-motorer , en posisjonssensor, en reduksjon av giret og en elektronisk krets. DC-motorene oppnås drevet fra et batteri og går med høy hastighet og lavt dreiemoment. Vi monterte aksel og gir koblet til DC-motorer, så kan vi øke og redusere motorhastigheten gradvis.
Posisjonssensoren registrerer akselen fra sin faste posisjon og sender informasjonen til kontrollkretsen. Kontrollkretsen dekoder signalene tilsvarende fra posisjonssensoren og sammenligner den faktiske plasseringen av motorene med den foretrukne posisjonen og kontrollerer følgelig DC-motorens rotasjonsretning for å få den nødvendige posisjonen. Generelt krever servomotoren 4,8 V til 6 V DC-forsyning.
Servomotoren styres av en seriell port
Hovedintensjonen med dette prosjektet er å kontrollere servomotoren ved hjelp av en personlig datamaskin. Det trenger en enkelt kontrollinje fra mikrokontrolleren og den serielle inngangslinjen, fra den personlige datamaskinens serielle port for å sende kommandoer til kretsen. Tidspunktkilden er levert av krystalloscillatoren. Designet servomotorkrets koblet til datamaskinen ved hjelp av seriekabelen og nivåskifteren, og åpne deretter 'Hyper Terminal' -programvaren på PCen for å velge datamaskinens komport.

Servomotorstyring med seriell portkommandoer
Når kommandoene er sendt fra den personlige datamaskinen (PC) til mikrokontrolleren gjennom hyperterminalen med en nivåskifter, får mikrokontrolleren disse dataene og sammenligner dem med de forhåndsdefinerte dataene og genererer tilsvarende signaler for å aktivere motordriveren for å kjøre den på ønsket hastighet. Mange mikrokontroller-prosjekter utviklet basert på servomotor som balanseringsroboter, rullebanehelikoptre og så videre. Vi kan bruke servomotor for sikkerhetsformål ved å grensesnitt med trådløst kamera så vi kan mulig å styre kamera 360 avvik.
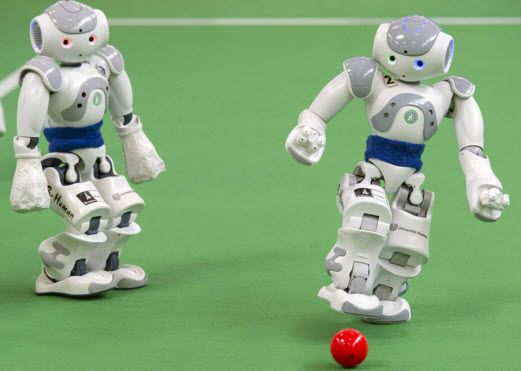
Selvbalanserende robot
Den selvbalanserende roboten er i stand til å balansere seg selv ved hjelp av servomotorene. Denne roboten er montert ved hjelp av strukturelle, mekaniske og elektroniske komponenter som produserer en synlig ubalansert plattform som er sterkt disponert for å tippe i en justering. Hjulene til roboten er i stand til uavhengig rotasjon på to måter, som drives av en servomotor. Informasjon om enhetens vinkel i forhold til bakken vil bli hentet fra vippesensorer på enheten.

Selvbalanserende robot
Vippesensoren kan være et akselerometer, gyroskopisk sensor eller IR-sensor (for å måle avstand til bakken). Sensorene sender informasjon til kontrollenheten, som vil behandle tilbakemeldingen ved hjelp av en grunnleggende proporsjonal, integrert, derivat (PID) -algoritme for å generere kompenserende posisjonskontrollsignaler til servomotorene for å balansere enheten.
Servomotorapplikasjoner
- Den brukes i pressemaskiner for å kutte stykkene i størrelse
- Den brukes i sukkerpåfyllingsstasjonen
- Den brukes i merkingsapplikasjoner
- Det brukes pakkesystem med tilfeldig timingfunksjon
- Den brukes Brukes i fly
Fordeler med servomotor
- Hvis en motor får tung belastning, vil sjåføren øke strømmen til motorspolen når den prøver å rotere motoren. Hovedsakelig er det ingen ut-av-trinn-tilstand.
- Høyhastighetsdrift er mulig med servomotorer.
Dette handler om servomotorens arbeidsprinsipp og grensesnitt med 8051 mikrokontroller Videre, for teknisk hjelp angående denne artikkelen eller elektronikkprosjekter som er designet ved hjelp av grensesnittanlegg som RTC, OLED, flashminne, tilpasset LCD, berøringsskjermdisplayer osv. Du kan kontakte oss ved å gi dine kommentarer i kommentarseksjonen nedenfor.