I dette innlegget undersøker vi hva som er en BLDC-motor, og deretter lærer vi oss om utformingen av en sensorløs BLDC-motorkrets.
BLDC CPU-vifter
Har du sett de raskt bevegende viftene i CPUer, spenningsstabilisatorer, DVD-spillere og annet lignende utstyr, som fungerer med størst effektivitet og bruker minst mulig plass, strøm og likevel er i stand til å levere de viktige operasjonene som er spesifisert for det spesielle utstyret?
Ja, dette er alle moderne versjoner av BLDC-vifter eller børsteløse DC-motorer som er mye bedre enn de gamle tradisjonelle børstede motorene.

Bilde med tillatelse: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Imidlertid vil en BLDC-motor kreve en sofistikert driverkrets, og ja, alle disse CPU-viftene inneholder disse drivermodulene innebygd, selv om disse ser ut til å være lette å betjene ved hjelp av en vanlig DC, er systemet allerede utstyrt med en smart krets.
BLDC motor driver
Her vil vi lære om en slik smart BLDC motor driver krets, ved hjelp av en enkelt chip DRV10963 for å kjøre en hvilken som helst liten BLDC motor med utrolig effektivitet, og senere i en av de kommende artiklene vil vi se hvordan denne IC kretsen kan oppgraderes for å kjøre selv de kraftige BLDC-ene med høy strøm, som de som er brukes i quadcopters.
Men før dette ville det være interessant å lære litt om BLDC-motorer.
Forskjellen mellom børstede og børsteløse DC-motorer
Forskjellen mellom en børstet motor og en børsteløs motor og effektivitetsgraden er ganske åpenbar.
Siden børstede motorer har sårarmaturet i bevegelse mellom magneter, må de bruke 'børster' (gnidningskontakter) slik at spoleterminalene i bevegelse er i stand til å motta forsyningsspenningen uten å måtte nå forsyningskilden selv, noe som ellers ville gjøre arbeider umulig og bringer operasjonene i fare.
I en børsteløs motor beveger spolen eller viklingen seg aldri og er konstant, her bærer rotoren et sett med permanente magneter og roterer under påvirkning av omgivende viklings magnetiske strømninger.
Siden magneten er fri for alle problemer, og er i stand til å jobbe uten å involvere terminaler for å administrere eller motta strøm, kan den gå uanstrengt, spinne i rask hastighet og praktisk talt på et lydløst nivå.
Men det er en fangst her. For å få en elektromagnet til å reagere på en permanent magnets strømninger, må det være et konstant skifte av magnetfase eller poler, slik at de to motstykkene er i stand til å reagere konstant og gå gjennom en motsatt kraft og derved frigjøre den nødvendige vridningskraften over rotoren og utfør rotasjonen med det resulterende dreiemomentet.
I en børstet motor blir dette lettere på grunn av den selvjusterende naturen til ankerspolen som er i stand til å rotere og skape en selvopprettholdende motsatt magnetisk kraft og fortsette å rotere uten behov for eksterne pulser eller prosessering.
Imidlertid blir dette i et BLDC et problem siden magnetrotoren forblir 'clueless' og krever en beregnet magnetisk kommando fra viklingen for å rotere på en meningsfull måte og ikke på en tilfeldig måte.
Det er nøyaktig hvorfor alle BLDC-motorer obligatorisk krever en motordriverkrets for å styre de tre forskjellige sett med vikling inne i motoren.
Således er alle BLDC i hovedsak 3-fasede motorer og krever obligatorisk 3 faser for å produsere rotasjonsmomentet på rotoren.
Hva gjør sensorløse BLDC-drivere
Den sensorløse BLDC-driverkretsen elektrifiserer ganske enkelt de tre settene med vikling på en sekvensiell måte slik at den magnetiske rotoren er i stand til å gå gjennom en jevn motsatt kraft som gjør det mulig for motoren å oppnå et vedvarende dreiemoment og rotasjonskraft.
Men denne sekvensielle driften av BLDC-viklingen ved kretsen kan ikke bare settes tilfeldig, den må være i tandem eller som svar på rotormagnetens rotasjonsposisjon, ellers kan implementeringen gå haywire og vi kan være vitne til motorakselen (rotor ) roterer på en vilkårlig måte, det vil si at det rykker inn mellom klokken og mot klokken uten fornuftig rotasjon.
Hvorfor sensorer brukes i BLDC-motorer
Derfor introduserer vi sensorer plassert i mange BLDC-motorvarianter, disse sensorene (vanligvis Hall-effektfølere) 'forstår' endringsposisjonen til magnetmolene til rotormagneten, instruerer den vedlagte prosessorkretsen om å elektrifisere den tilsvarende viklingen og utføre en rotasjonsbevegelse med et optimalt dreiemoment.
Hall-effekt-sensorer brukes effektivt i de fleste BLDC-motorer som har relativt større størrelse, men for mindre motorer som CPU-vifter, CPU-stasjoner, DVD-spillere, i små eksosvifter, for motorer som brukes i quadcopters, kan hall-effekt-sensorer bli upassende og derfor implementeres en alternativ sensor mindre tilnærming.
Dette innebærer utnyttelse av viklingens iboende bakre EMF-elektrisitet, som tas som referansekilde for prosessering og elektrifisering av de aktuelle settene med vikling og utførelse av rotasjonsmomentet.

Simulering av en BLDC rotorbevegelse
I den ovennevnte rå simuleringen kan vi visualisere hvordan den frigjorte EMF blir tatt som referanse og brukt for å produsere sekvenseringspulser for de påfølgende settene av vikling, og påfører et roterende dreiemoment på den sentrale permanentmagnetrotoren. Simuleringen er kanskje ikke den eksakte replikasjonen, men likevel gir den en grov ide om arbeidsprinsippet.
Det er interessant å merke seg at pulsen byttes når magnetens N / S er nøyaktig i midten av viklingskjernen, noe som gjør at viklingen enten aktiveres som N eller S, avhengig av pulspolariteten og produserer en tiltrekkende og frastøtende kraft på N / S-magneter, og derved generere det nødvendige dreiemomentet på maksimalt mulig nivå.
Og dette blir igjen mulig på grunn av EMF-ryggen frigjort gjennom bytte av forrige vikling.
Ovenstående diskusjon tydeliggjør arbeidet med en sensor uten BLDC-motor, la oss nå lære hvordan en spesifisert krets håndterer den ovennevnte komplekse utførelsen av en 3-fasebryting
BLDC Driver DRV10963
Etter litt googling fant jeg denne sensorløse BLDC-driverkretsen ved hjelp av en enkeltbrikke DRV10963 som bruker ubetydelig mengde deler i konfigurasjonen, og som likevel er i stand til å implementere en sofistikert behandling for de tiltenkte handlingene.
DRV10963 er en toppmoderne brikke som er spesielt designet for å betjene sensormindre BLDC-motorer ved bare å forutse den bakre EMF fra motorviklingen og levere en presis kommando over viklingen og oppnå et optimalt rotasjonsmoment over rotoren.
Kretsdiagram

Ovenstående bilde viser den enkle utformingen av kretsen som tilsynelatende ikke inneholder annet enn selve IC.
De forskjellige pinouts er tildelt for å utføre de spesifiserte funksjonene, for eksempel PWM-hastighetskontroll av motoren, retningskontroll, etc ved ganske enkelt å mate de aktuelle pinouts med spesifisert data fra en ekstern kilde.
Følgende bilde viser pakken til brikken, som ser ut som en 10-pin DIL IC, de forskjellige pinout-funksjonene til den samme kan studeres ut fra dataene som er vist under diagrammet:

Henvis til kretsskjemaet for den foreslåtte sensorløse BLDC-driverkretsen som presentert i forrige artikkel og også chipbildet ovenfor, kan pinouts detaljene forstås som følger:
IC Pinout-detaljer
FG = Det er motorhastighetsindikatorstiftet (utgang) som er rigget i åpen kollektormodus med en intern BJT.
Åpen kollektor betyr at utgangen på denne pinout vil produsere de negative PWM-ene gjennom synkende logikk over den åpne samleren og bakken, og for å få en gyldig avlesning må brukeren koble en pull-up motstand over denne åpne samleren og den positive tilførselen (5V ) for å oppnå hastighetsindikasjonen ved denne pinout.
FGS = Det er hastighetsindikatorvelgerinngangen, noe som betyr at en logikk høy eller lav kan innføres her for å slå PÅ / AV indikatorstiftet FG.
Vcc = Den positive tilførselen til IC-en for at den skal kunne fungere, må ikke overstige 5V.
W, U og V er 3-fase utgangene for BLDC-motoren som skal drives via denne IC. Dette fungerer også som innganger for å registrere motorens EMF-impulser for den nødvendige synkroniserte koblingen av motorspolene.
GND = Henviser til den negative forsyningspinnen til IC-en med hensyn til Vdd-pinnen.
FR = Hjelper til å velge eller styre motorens retning og kan endres dynamisk når som helst når systemet er slått på, ganske enkelt ved å innføre en ekstern logikk høy eller logisk lav.
PWM = Det betyr PWM-kontrollinngangen fra en ekstern PWM bølgeformgenerator.
Denne PWM-inngangen kan være variabel for implementering av ønsket hastighetskontroll for den tilkoblede BLDC-motoren.
Det stiplede rommet i midten av brikken indikerer den termiske puten, som kan festes eller trykkes med en kjøleribbe for å senke den mulige varmegenerering på brikken mens den brukes med en lastet BLDC-motor.
Ovennevnte diskusjon angir pinout eller tilkoblingsdetaljene til den sensorløse BLDC-motordrivbrikken DRV10963, la oss nå analysere den interne konfigurasjonen og funksjonen til brikken i detalj ved hjelp av følgende punkter:
Enhetsbeskrivelse
DRV10963 er en 3-fasers sensorløs elektrisk motoroperatør med innebygde MOSFET-er (3-faset H-bro). Den er skreddersydd for høyere produktivitet, redusert støy og minimale sekundære materialtellingsmotorfunksjoner. Det eksklusive sensorløse vindus-Iess 180 ° sinusformede styringsskjemaet gir støyfri pendlingseffektivitet.
DRV10963 består av en smart låsegjenkjenningsfunksjonalitet, satt sammen med ekstra innebygde sikkerhetskretser for å oppnå sikret ytelse. DRV10963 finnes i en termisk effektiv 10-pinners USON-emballasje med en avdekket termomatte.
Hvordan IC fungerer
DRV10963-produktet er en 3-fasers sensorløs motoroperatør med MOSFETs tilført strøm, det er
laget spesielt for overlegen ytelse, redusert resonans og minimale overfladiske deltall motorstasjonsfunksjoner.
Den viktigste sensorløse vindusfrie 180 ° sinusformede kontrollplanen presenterer lydløs motorfunksjon ved å opprettholde nominelt elektrisk stimulert dreiemoment. Ved initialisering skal DRV10963-enheten dreie motoren i løpet som er spesifisert gjennom FR-inngangspinnen.
DRV10963-brikken skal fungere med en 3-faset BLDC-motor ved bruk av en sinusformet kontrollplan.
Betydningen av de brukte sinusformede fasespenningene avhenger av PWM-pinnens driftssyklus. Mens motoren beveger seg, leverer DRV10963 IC hastighetsdataene på FG-stiften.
DRV10963-enheten består av en smart låsefølsomhet. I tilfelle det som der motoren blir forstyrret av et fremmet trykk, vil programmet identifisere låseproblemet og vil ta tiltak for å beskytte alene sammen med motoren.
Den spesifikke prosedyren for låsefølsomhetskretsen er avbildet i detalj i Låsegjenkjenning. DRV10963 IC inkluderer dessuten flere innebygde sikkerhetskretser, for eksempel overstrømsbeskyttelse, overspenningsbeskyttelse, underspenningsbeskyttelse og over temperaturbeskyttelse.
Karakteristisk forklaring
Hastighetsinngang og kontroll
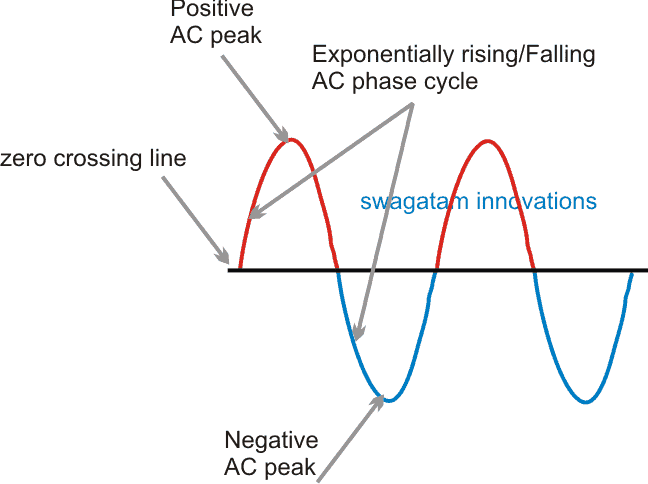
DRV10963 presenterer 3-fase 25-kl-lz PWM-utganger som kan ha en standard prosentandel av sinusformede bølgeformer fra fase til fase. I tilfelle en hvilken som helst syklus bestemmes med hensyn til bakken, er det sannsynlig at den oppdagede bølgeformen er en PWM-beskyttet sinusformet kombinert med 3. ordens harmoniske som vist i figur 2.

Denne kodingsstrategien strømlinjeformer sjåførspesifikasjonene fordi det sannsynligvis ofte vil være en faseutgang som kan være på nivå med null.
Utgangsamplituden varierer i henhold til forsyningsspenningen (VCC) og den obligatoriske PWM-driftssyklusen (PWM) som definert i ligning 1 og fremhevet i figur 3. Den optimale amplituden er implementert når den instruerte PWM-driftssyklusen er 100 PERCENT.
Vphpk = PWMdc>

Motorhastigheten reguleres ikke direkte ved bruk av PWM-ordren for å regulere amplituden til fasespenningene som tilfeldigvis brukes til motoren.
Driftssyklusen til PWM-inngangen blir modifisert til en 9-bits digital mengde (fra 0 til 511).
Reguleringsoppløsningen er 1/512 == 0,2%. Driftssyklusanalysatoren muliggjør en første ordreutvekslingsoperasjon mellom inngangs-syklusen og den digitale figuren på 9 bits.
Dette er fremhevet i figur 4, der r = 80 ms.

Utvekslingsytelsen mellom den bestilte PWM-driftssyklusen og den maksimale utgangsamplituden er variabel i DRV10963-enheten.
Utfallets maksimale amplitude blir diskutert av ligning 1 når PWM-kommando> minst fungerende driftssyklus. Den laveste driftssyklusen er ofte etablert til muligens 13%, 10%, 5% eller ingen begrensning ved OTP-innstilling (MINOP_DC1: 0).
Tabell 1 viser de anbefalte konfigurasjonene for den minimale driftssyklusen.
Når den PWM-instruerte driftssyklusen er mindre enn den laveste fungerende driftssyklusen og mer enn 1,5%, vil utgangen reguleres til den minimale driftssyklusen. Når inngangssyklusen er under 1,5%, vil DRV10963-enheten sannsynligvis ikke kjøre utgangen, og sendes til standby-modus.
Dette kan illustreres i figur 6.

Rotasjonskonfigurasjoner
DRV10963 vil starte motoren ved hjelp av en teknikk som er detaljert beskrevet i figur 7.

Motorinitialiseringsgrafen består av enhetskonfigurerbare alternativer for åpen sløyfe for å lukke sløyfeovergangsgrense (HOW.), Justere tid (TAHQH) og akselerere hastighet (RACE).
For å rette opp rotoren til kommuteringslogikken, utfører DRV10963 en x% driftssyklus på fasene V og W samtidig som fase U kontrolleres ved GND.
Dette scenariet opprettholdes i TAIign sekunder. X% -betydningen identifiseres av VCC-spenningen (som vist i tabell 2) for å holde opp rikelig rotasjonsmoment over forskjellige forskjellige forsyningsspenninger.
Når justeringssekvensen oppnås, blir motoren tvunget til å øke hastigheten ved å sette på sinusformede fasespenninger med toppnivåer som illustrert i tabell 2 og øke ved hjelp av kommuteringsområdet med en ekspanderende hastighet representert av RACE til kommutasjonsnivået vokser til Hom ., Hz.
Så snart denne grensen er nådd, konverterer DRV‘l0963 til lukket sløyfemodus hvor kommutasjonsdrivprogresjonen blir gjenkjent av den innebygde kontrollalgoritmen mens den brukte spenningen blir identifisert av PWM-mandatens driftssyklusinngang.
Den åpne sløyfen for å stenge endringsgrense for sløyfe (Hom), justeringstid (TAHQH) og akselerasjonshastigheten (RACE) kan konfigureres gjennom OTP-konfigurasjoner.
Valget av utleveringsterskel (HVORDAN) godkjennes vanligvis ved prøve- og feilvurdering. Målet vil være å foretrekke en overføringstoleranse som kan være så lite som mulig, og som gjør at motoren enkelt og trofast kan skifte mellom akselerasjonen med åpen sløyfe og akselerasjonen med lukket sløyfe.
Vanligvis økte hastighetsmotorer (maksimal hastighet) krever en overlegen overleveringstoleranse på grunn av at motorer med forhøyet hastighet utgjør redusert Kt og dermed rimeligere BEMF.
Tabell 3 viser de konfigurerbare preferansene for utleveringstoleransen. Høyeste hastighet i elektrisk Hz er bevist som en referanse for å hjelpe til med å velge ønsket overleveringshastighet for en bestemt innsending.

Valget av justeringstid (TAHQH) og akselerasjonshastighet (RACE) kan til og med være betinget av prøving og feilsøking.
Motorer med større treghet krever normalt en lengre justeringstid og en svakere hastighetshastighet i motsetning til motorer med lav treghet som ofte krever en kortere justeringstid sammen med en raskere akselerasjonsprosent. Programkompromisser må implementeres for å utnytte lanseringsstabilitet i motsetning til rotasjonsperioden.
TI støtter å begynne med å bestemme de mindre intense konfigurasjonene (langsommere RACE og betydelig Tmign) for å kompromittere momentet opp til støtte for maksimal oppfyllelsesgrad.
Så snart utstyret er bekreftet for å utføre samvittighetsfullt, kan de ekstra kraftige konfigurasjonene (større RACC og mindre TAHQH) brukes til å redusere oppvekstmomentet og samtidig nøye holde rede på oppfyllelsesgraden.
Tabell 4 viser de konfigurerbare innstillingene for TA'g ,, og RACE.

Den gjenværende delen av forklaringen om denne sensorløse BLDC IC er innredet i dette originale databladet
Du er velkommen til å kommentere for å vite mer om de ovenfor diskuterte sensorløse BLDC-motordriverkretsdetaljene
Forrige: 12V LED-ryggsekkstrømforsyningskrets Neste: Quadcopter Remote Control Circuit uten MCU