I den moderne verden, robot vil spille en viktig rolle . Hovedformålet med roboten er å redusere mannens makt. Robotene brukes i elektronikk i mange applikasjoner. I denne artikkelen har vi diskutert hvordan du bygger en robot med Arduino-modulen og 8051 mikrokontroller. For å bygge en robot med Arduino forklarer vi om arduino-roboten med hindring. De nødvendige komponentene inkluderer robotlegeme, likestrømsmotor, ultralydssensor, Arduino-modul, motordriver-IC og Arduino-modul
Hvordan bygge en robot?
De nødvendige komponenter å bygge roboten inkluderer følgende
Robotkropp
Den grunnleggende robotkroppen til roboten til hindring av hindringer vises i det følgende bildet. Robotkroppen er en plastkropp og den inneholder hjul på begge sider. Foran robotlegemet er ultralydssensoren ordnet. Ved å bruke ultralydssensoren kan hindringen oppdage. Når roboten beveger seg, hvis ultralydssensoren oppdager noen hindring, vil roboten bevege seg til side og fortsette å bevege seg.

Robotkropp
DC-motor
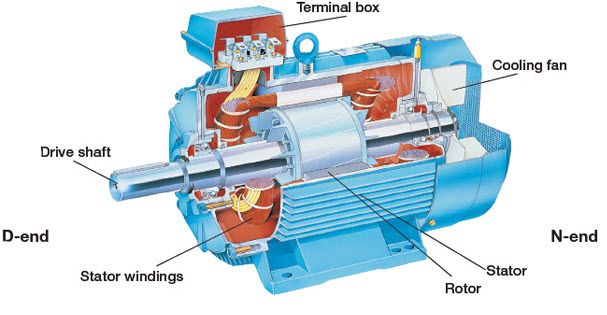
De DC-motor er en elektrisk motor og den går på likestrøm. Driften av enhver elektrisk motor er basert på elektromagnetismen. Magnetfeltet produseres av strømførende leder når det plasseres i et eksternt magnetfelt, det vil oppleve en kraft proporsjonal med strømmen i lederen. Generelt vet vi at magneter er motsatt polaritetsattraksjon fra nord til sør, og hvis polaritetene er de samme som nord til nord og sør til sør da magneter vil avvise.

DC-motor
Den interne konfigurasjonen av DC-motor er designet for å feste magnetisk interaksjon mellom strømførende leder og det eksterne magnetfeltet for å produsere bevegelsen. I dette bruker vi to DC-motorer, hver motor inneholder 6v og totalt to DC-motorer inneholder 12v. De to likestrømsmotorene er plassert i robotlegemet som vi kan se i det følgende bildet. Robotkroppen flyttes ved hjelp av DC-motorene

Robotkropp med DC-motor
Arduino-modul
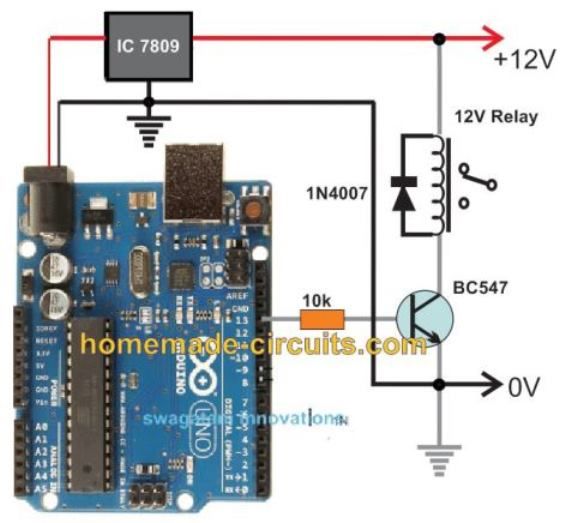
Følgende bilde viser arduino-modulbildet. De arduino-modul spiller en viktig rolle i utformingen av hindrings unngåelsesroboten ved hjelp av arduino-sett. Mottakerstiften til arduino er koblet til den andre stiften til ultralydsensoren, og den første, andre og tredje stiften på arduino-modulen er koblet til DC-motoren. Vanlige komponenter kondensator og diode er også koblet til arduino-modulen ved hjelp av batteristrømforsyningen.

Arduino-modul
Motor Driver IC
Å kjøre DC-motoren motorføreren IC brukt. Pinnene 3,6 & 11, 14 til motordriveren er koblet til DC-motoren. Inngangstappen 1 og 2 er koblet til arduino-modulen, og aktiveringsstiften er koblet til senderen på arduinoen. Pinnene 4, 5, 12, 13 til motordriveren er koblet til bakken.

Motor Driver IC
Ultralydssensor
I dette konseptet ultralydssensoren brukes til å oppdage et hinder foran deg, og det vil sende kommandoen til arduino-styret. Avhengig av inngangssignalet omdirigerer mikrokontrolleren roboten for å bevege seg i alternative retninger.

Ultralydssensor
Anvendelsene av arduino robot hindring unngåelse
- Arduino-roboten kan bevege seg på en hvilken som helst overflate
- Den kan bevege seg på metalloverflaten som kjøleskap.
Bildet nedenfor viser arduino-roboten for hindring av hindringer

Arduino-robot for hindring av hindringer
Å bygge en robot med 8051 mikrokontrolleren vi forklarer om metalldetektor-robotkjøretøyet. Komponentene som kreves for å bygge roboten med 8051 mikrokontrolleren er
- 8051 mikrokontroller
- DC-motorer
- Motordrivere
- Metalldetektor
- Dekoder
- Koder
- Trykke knapper
- Krystall
- RF-sender og mottaker
Metalldetektor
De metalldetektor er en spole den har en eller flere metallspoler som brukes til å oppdage metallene på bakken. Metalldetektoren fungerer på prinsippet om elektromagnetisk induksjon. Metalldetektoren er koblet til robotlegemet gjennom PCB, som vi kan se på det siste bildet. Følgende bilde viser den generelle metalldetektoren som brukes i elektroniske prosjekter.

Metalldetektor
Trykke knapper
Trykknappene er knapper som består av harde metaller som plast og metall. Vanligvis brukes trykknappene til å tilbakestille programmet i mikrokontrolleren. Følgende bilde viser trykknappbildet.

Trykknapp
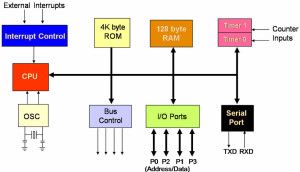
8051 Mikrokontroller
De 8051 mikrokontroller består av 40 pinner . Den fjerde og femte pinnen på mikrokontrolleren er koblet til krystalloscillatoren. Vcc-pinnen er gitt til strømforsyningen til 5V, og jordpinnen er koblet til bakken. Pinnene 15, 16, 18, 19 til mikrokontrolleren er koblet til koderen IC for HT12E. Mikrokontrollertappene 2, 7, 8, 9 er koblet til trykknappene.
Følgende bilde etter tilkobling av alle komponentene som motstand, kondensator, krystalloscillator, 8051-serie mikrokontroller, kodere og etc er på kretskortet .

PCB-tilkoblinger
Bildet under viser metalldetektorroboten med 8051-serien mikrokontroller.

Metal Detector Robot med 8051 Series Microcontroller
I denne artikkelen har vi diskutert om Hvordan bygge en robot med arduino og 8051 Microcontroller . Jeg håper du har fått litt grunnleggende kunnskap for å bygge en robot ved å lese denne artikkelen. Hvis du har spørsmål om denne artikkelen eller om elektronikk og kommunikasjonsprosjekter , er du velkommen til å kommentere nedenfor. Her er spørsmålet for deg, Hva er en 8051-serie mikrokontroller?
.


![Bygg en enkel Buck Converter-krets [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)